

روتاری اینکودر Rotary Encoder چیست ؟
1399-06-10
درایور استپر موتور یا درایو راه انداز موتور پله ای چیست ؟
1399-08-20استپ موتور چیست ؟ و چگونه کار می کند ؟

استپ موتور چیست ؟ و چگونه کار می کند ؟
استپ موتور چیست ؟
استپ موتور نوعی از موتور dc است که به صورت گسسته حرکت می کند. درون استپ موتور چندین سیم پیچ وجود دارد که در گروه هایی به نام فاز قرار داده شده اند. با عبور الکتریسیته از هر یک از این فازها، موتور با سرعت یک گام در واحد زمانی به چرخش در می آید.
با کنترل کردن گام های استپ موتور توسط یک کامپیوتر، میتوان کنترل سرعت و موقعیت بسیار دقیقی به دست آورد. به همین دلیل استپر موتورها گزینه هایی مناسب برای استفاده در پروژه هایی هستند که نیاز به کنترل حرکت دقیق دارند. استپ موتورها در اندازه ها و انواع مختلف با مشخصات الکتریکی متفاوت برای کارهای صنعتی مختلفی وجود دارند که بر حسب نیاز می توان یکی از آن ها را انتخاب کرد.
استپر موتور (Stepper Motor) یا استپ موتور (Step Motor) یا موتور پله ای یک موتور براشلس (Brushless) الکتریکی DC است که یک دور کامل (۳۶۰ درجه) را به تعدادی پله یا استپ مساوی تقسیم می نماید. کنترل موقعیت موتور پله ای برای رفتن به یک پله خاص یا ماندن در آن پله بدون استفاده از سیستم فیدبک می باشد و این نشانه دقت بالای این موتور ها است.
این موتور ها در هر پله یا استپ به میزان خاصی بر حسب درجه دوران می کنند ، به عنوان مثال محور استپ موتور ۲۰۰ استپ در هر استپ 1/8 درجه دوران می کنند.
از موتور استپر یا (همان استپ موتور) در اتوماسیون صنعتی برای کنترل دقیق موقعیت از طریق کنترل دیجیتال استفاده می شود. این دستگاه انرژی الکتریکی را به انرژی مکانیکی تبدیل میکند. استپر یا موتور پله ای دارای حرکات چرخشی است و با هر پالس که از کنترلر دریافت می کند، به میزان مشخص دوران می نماید.
موتور توسط همگام سازی دقیق با خروجی پالس سیگنال ، از کنترل کننده به سمت درایور عمل می کند. موتورهای پله ای یا استپ موتور ، با توانایی تولید نیروی گشتاوری زیاد در سرعت کم با حداقل لرزش، برای برنامه های که نیاز به کنترل موقعیت سریع در یک فاصله کوتاه دارند مناسب هستند.
استپر موتورها کنترل دقیق موقعیت را به سادگی امکان پذیر می کنند . آنها در تجهیزات مختلف، برای زاویه چرخش دقیق و کنترل سرعت، با استفاده از سیگنال های پالس استفاده می شود. موتورهای پله ای نیروی گشتاوری بالا را تولید می کنند و برای شتاب و واکنش سریع مناسب هستند. استپ موتورها بدلیل طراحی مکانیکی خود، موقعیتشان را در حالت توقف نیز حفظ می کنند. استپر شامل درایور (سیگنال های پالس را وارد کرده و آنها را به حرکت موتور تبدیل می کند) و یک موتور استپر است.
استپ موتور چگونه کار می کند ؟
توضیح اول :
موتور های DC جاروبک دار معملا مادامی که به ترمینال های آنها ولتاژ اعمال شود به حرکت پیوسته ادامه می دهند. اما بر خلاف دسته یاد شده ، استپ موتور ها فاقد جاروبک یا براشلس هستند و مشخصه اصلی آنها که آنها را از سایر انواع موتور ها متمایز می کند این است که با اعمال پالس به ترمینال های آن (عموما پالس های موج مربعی) موقعیت شفت یا محور موتور به میزان مشخص و از پیش تعیین شده ای (در هنگام تولید موتور) دوران می کند.
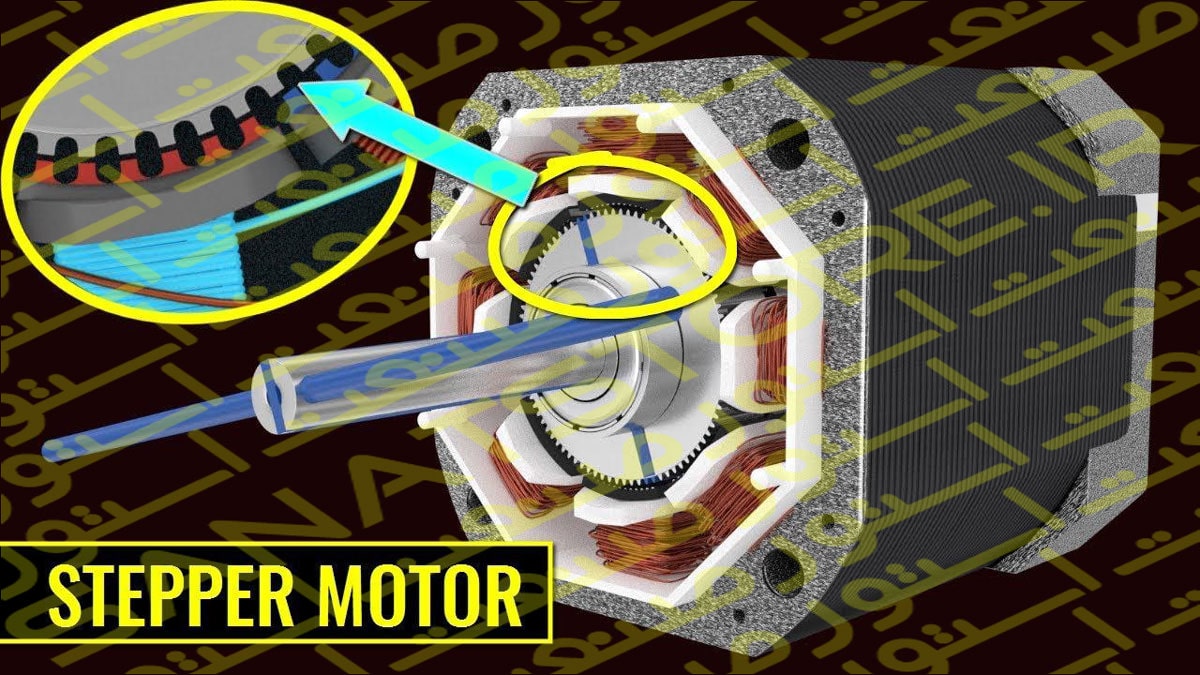
هر پالس به میزان مشخصی زاویه محور را تغییر می دهد. در استپر موتور ها در اطراف هسته مرکزی چندین الکترومگنت (آهنربای های الکتریکی) دندانه داری قرار دارند و در مرکز نیز یک سیلندر آهنی دندانه دار (به شکل چرخ دنده) وجود دارد. این الکترو مگنت ها به وسیله ی یک کنترلر خارجی (به عنوان مثال میکرو کنترلر) فعال و غیر فعال می شوند.
با برانگیخته شدن اولین الکترومگنت ، سیلندر مرکزی دندانه دار شروع به چرخش می کند تا دندانه های روی سیلندر دقیقا مقابل دندانه های اولین الکترو مگنت قرار بگیرند. (به خاطر داشته باشید در این حالت دندانه های سیلندر مرکزی فقط با دندانه های اولین الکترومگنت مطابقت می نماید و با دندانه های سایر الکترومگنت ها انطباق ندارد.)
با فعال شدن الکترو مگنت بعدی و غیر فعال شدن اولین الکترومگنت ، دندانه های روی روتر (Rotor) با دندانه های الکترومگنت بعدی منطبق می شود به هر یک از این چرخش ها یک پله یا یک استپ می گویند و بدین شکل یک استپ به جلو یا عقب حرکت می کند. با ادامه این فرآیند موتور به چرخش ادامه می دهد. استپ موتور ها می توانند به این شکل زوایای دقیقی حرکت کنند.
توضیح دوم :
موتورهای DC زغالی زمانیکه ولتاژ به ترمینالهای آنها تزریق میگردد به نرمی حرکت میکنند. استپ موتور به وسیله قابلیت تبدیل پالسهای ورودی به فواصل کوچک مشخص در موقعیت شفت شناخته میشوند. هر پالس شفت را به یک زاویه مشخص می برد. استپ موتورها اساساً دارای دندانههای مغناطیسی در اطراف یک شفت مرکزی از جنس آهن میباشند. الکترومغناطیسها بوسیله یک مدار راه انداز خارجی یا یک میکروکنترلر تغذیه میگردند. جهت چرخاندن شفت ابتدا به یکی از مغناطیسها توان داده میشود، که مغناطیس باعث جذب دندانههای دنده می گردد.
زمانیکه دندانه دنده روبروی اولین مغناطیس میایستد، نسبت به مغناطیس بعدی دارای یک فاصله میباشد. این به معنای آنست که در صورت روشن شدن الکترومغناطیس بعدی و خاموش شدن اولی دنده به آهستگی میچرخد تا دندانه روبروی مغناطیس دوم قرار گیرد. از آنجا فرایند آغاز میگردد. هر یک از این چرخشها یک گام (استپ) نامیده می شود، تعداد مشخصی از این گامها یک دور کامل موتور را میسازند (دقت شود نسبت تعداد گامها به دور موتور همواره یک عدد صحیح است) و به این ترتیب یک موتور میتواند با زوایای مشخص بچرخد.
برخلاف یک موتور DC معمولی ، چرا اینقدر سیم از استپ موتور بیرون آمده است ؟
برای درک این موضوع باید بدانید که موتور های پله ای نمیچرخند، بلکه از پله ای به پله ی دیگر میروند و به همین دلیل به عنوان موتور های پله ای شناخته میشوند. این موتور ها در خود دنباله ای از کویل ها دارند.
هنگامی که هر سیم پیچ انرژی میگیرد، موتور یک پله حرکت میکند و دنباله از انرژی باعث میشود موتور پیوسته بچرخد.
اجزا تشکیل دهنده استپ موتور :
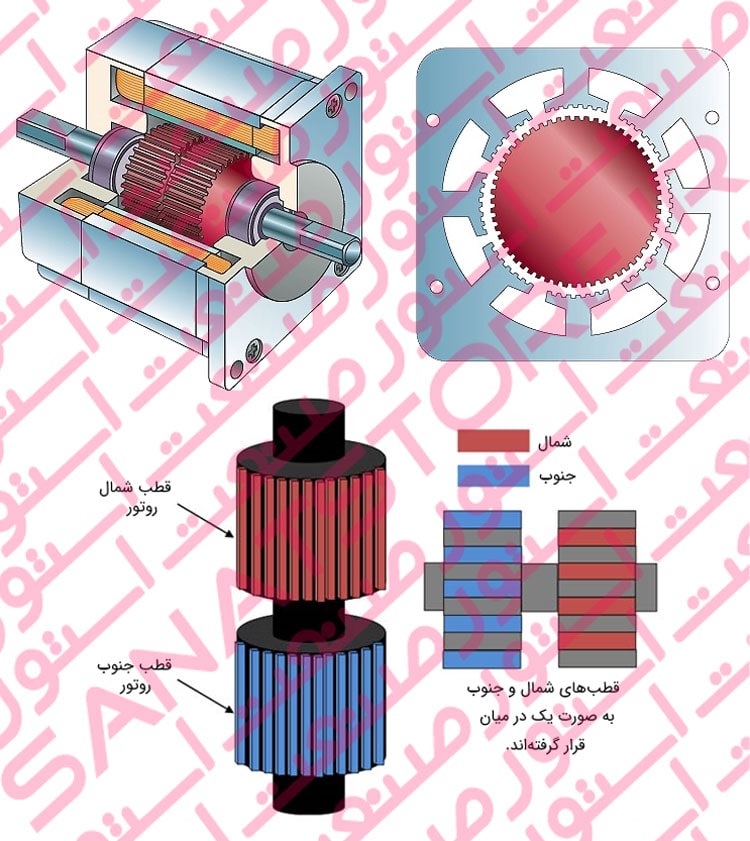
استپ موتور از قسمت های استاتور، روتور و قاب های سر و انتها تشکیل شده است :
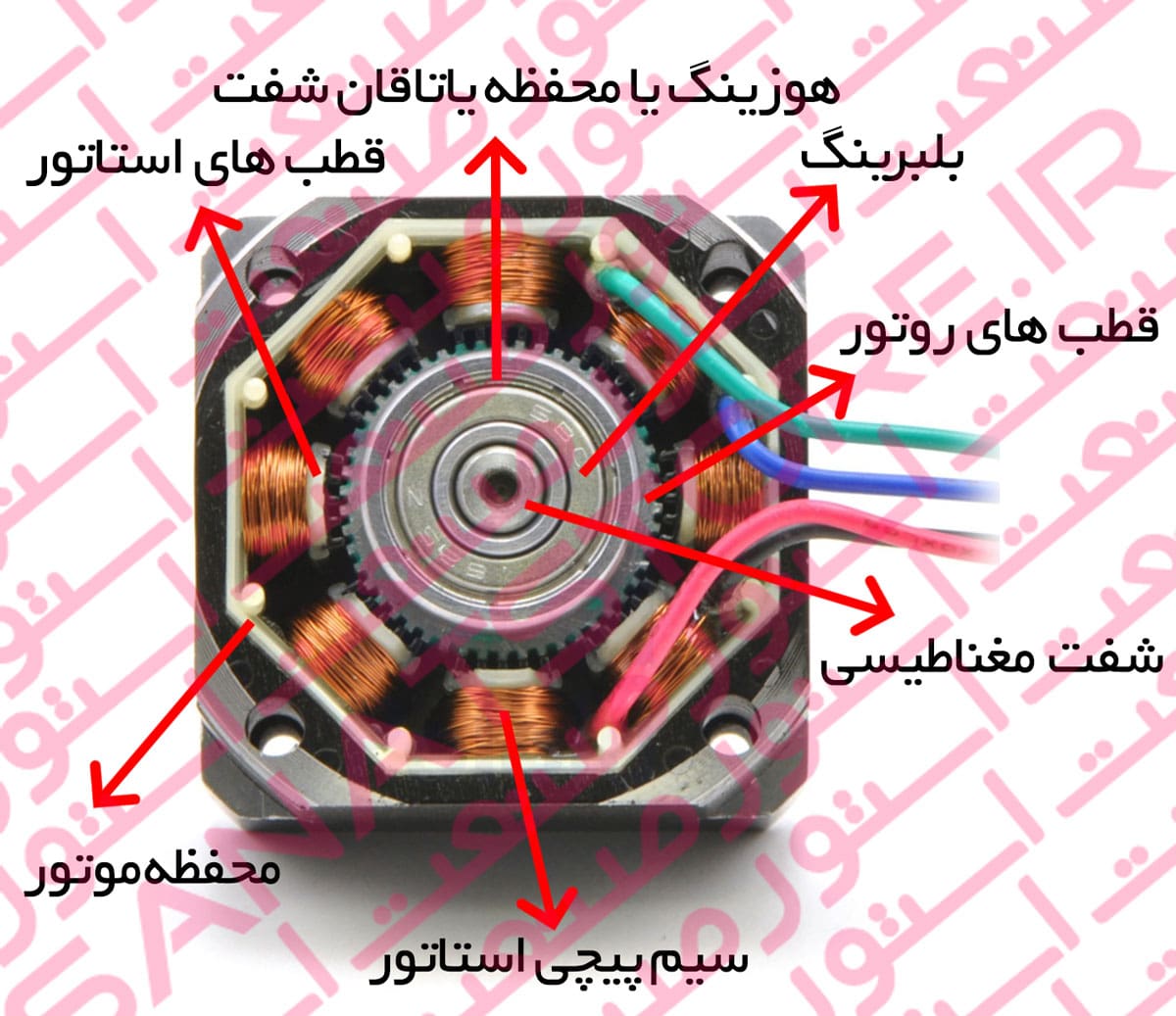
الف) استاتور : در قسمت استاتور تعدادی سیم پیچ با هم گروه بندی شده اند. مثلا در استپ موتور دو فاز دو گروه سیم پیچ می بینید که از داخل با هم اتصال دارند که نهایتا چهار سیم از آن ها بیرو ن آمده که دو به دو به هر کدام به گروه سیم چیپ ها متصل اند. در استپ موتور سه فاز شش سیم خروجی خواهید داشت و در استپ موتور 5 فاز 10 سیم خروجی ، البته این نکته باید گفته شود که در استپ موتورها گاها این ده سیم یا شش سیم از داخل با یکدیگر سری یا موازی میشوند و بیرون می آیند.
ب) روتور : روتور معمولا بسته به اینکه گشتاور استپ موتور و طول استپ موتور چقدر است تعداد طبقات کمتر یا بیشتری دارد. مثلا در یک استپ موتور که 4 طبقه است اگر میخواهد طول بیشتری داشته باشد می تواند تا 8 طبقه شود که در نتیجه آن گشتاور استپ موتور بیشتر می شود یا میتواند طول آن به 2 طبقه کاهش پیدا کند که در آن صورت نیز گشتاور استپ موتور نصف خواهد شد.
پ) قاب استپ موتور : در تمامی استپ موتور ها بر خلاف باقی موتورها که بوش و بلبرینگ وجود دارد در استپ موتور در دو طرف فقط بلبرینگ میبینید. علت عمر بالای استپ موتور هم همین موضوع است یعنی اثری از ذغال نمیبینید که بخواهد تمام شود یا اینکه بوشی وجود ندارد که بوش بخواهد جا بیندازد و خراب شود و عملکرد استپ موتور با مشکل مواجه شود.
منظور از استپ موتور 2 فاز ، استپ موتور 3 فاز و استپ موتور 5 فاز چیست؟ چه تفاوتهایی با هم دارند؟ موارد استفاده هر کدام کجاست ؟
مقایسه انواع استپ موتور از لحاظ مشخصات فنی :
1- سرعت کارکرد استپ موتور : 5 فاز > 3 فاز > 2 فاز
2- دقت کارکرد استپ موتور : 5 فاز> 3 فاز > 2 فاز
3- صرفه اقتصادی استپ موتورها : 2 فاز > 3 فاز > 5 فاز
4- موجودی بازار : 2 فاز > 5 فاز > 3 فاز
مقایسه انواع استپ موتور از لحاظ کاربرد :
5- استپ موتورهای 3 فاز بیشتر در حرکتهای با رفت و برگشت زیاد و سریع به کار می روند.
6- استپ موتورهای 5 فاز در حرکتهای با سرعت و دقت بالا به کار گرفته می شوند، تا جایی که یک استپ موتور 5 فاز با درایور میکرواستپ می تواند دقتی تقریبا معادل یک سرو موتور 17 بیتی داشته باشد.
7- استپ موتورهای 5 فاز با درایور معمولی (Full/Half) لرزش بسیار کمی دارند و جز در موارد با دقت زیاد، نیازی به درایور میکرو استپ ندارند.
8- استپ موتور های دو فاز با درایور معمولی (Full/Half) لرزش زیادی دارند و می بایست برای حذف لرزش آنها از روشهای مکانیکی استفاده نمود.
به صورت کلی، اگر در پروژه های خود از سرو موتور (+گیربکس) استفاده می کنید، ولی به سرعت بالایی نیاز ندارید کمتر از (500RPM) و گشتاور مورد نیازتان نیز (کمتر از 30N.M) است، می توانید جهت کاهش هزینه های خود به استپ موتور فکر کنید.
مزایا و معایب استفاده از استپ موتور :
مزایای استپ موتور : یکی از مهمترین مزایای موتور پله ای این است که از کنترل موقعیت بسیار خوبی برخوردار است و از این رو می توان برای کاربرد هایی که نیاز به کنترل دقیق دارند استفاده کرد. همچنين گشتاور بسيار خوبي دارد كه آن را به انتخابي مناسب براي برنامه هاي رباتیک می كند. همچنین موتورهای پله ای دارای عمر بالاتری نسبت به موتورهای معمولی DC یا سروو موتور هستند.
با هزینه خیلی کم پروژه های کنترل موقعیت میتوان انجام داد. ابعاد کوچکی دارند و در ابعاد کوچک گشتاور زیادی میتوانند اعمال کنند. سایزبندی های مختلف دارند و بسته به پروژه های مختلف میتوان از آن ها استفاده کرد. درایورهای آن ها درایور های ساده ای است و کار با آن ها ساده است.
کنترل دیجیتالی ساده ، فاقد خطای تجمعی ، توقف ناگهانی بدون آسیب ، بدون جاروبک ، بدون نیاز به فیدبک پایدار ، ساختمان مکانیکی ساده ، راهاندازی ساده و ارزان
گشتاور در سرعت کم (Low Speed Torque) :
موتور های DC معمولی در سرعت های کم گشتاور قابل توجهی ندارند، یک استپر موتور بیشترین گشتاور را در سرعت های کم دارد، بنابرین بهترین انتخاب برای کاربردهایی است که نیاز به سرعت کم با بیشترین دقت را دارند.
معایب استپ موتور : مانند تمام موتور های دیگر ، استپ موتور ها نیز معایب خاص خود را دارند. زیرا با قدم های کوچک می چرخد و نمی تواند به سرعت بالایی برسد. همچنین نیاز به انرژی بیشتری دارند.
در سرعت های خیلی بالا نمیتوانند کار بکنند. اگر در پروژه اینرسی بار زیاد باشد احتمال اینکه خطایی رخ دهد وجود دارد و آن خطا باید به نوعی اصلاح شود به این صورت که درسیستم کالیبراسیون قرار داد یا انیکه اینکودری داشته باشید تا خطاها را تشخیص دهد.
توان خروجی محدود ، دوران با پله ثابت ، قادر به تغذیه بار با اینرسی زیاد نیست ، پرش و نوسان زیاد ، راندمان کم
راندمان کم (Low Efficiency) :
برخلاف موتور های DC، مصرف جریان استپر موتور با بار متصل به آن ارتباطی ندارد، بیشترین جریان را هنگامی که در وضیعت بی باریست تحمل می کند، به همین دلیل در طول راه اندازی گرم می شود.
گشتاور محدود در سرعت بالا (Limited High Speed Torque) :
به طور کلی، استپر موتور ها در سرعت های بالا گشتاور کمتری نسبت به سرعت های پایین تر دارند، بعضی از استپر موتور ها برای عملکرد بهتر در سرعت بالا بهینه سازی شده اند، اما باید توسط راه انداز (Driver) مناسب برای این حالت راه اندازی شوند.
نبودن فیدبک (No Feedback) :
برخلاف سرو موتورها، بیشتر استپ موتورها فیدبک درونی برای تعیین موقعیت خود ندارند، اگرچه دقت مناسبی با راه اندازی در حالت حلقه-باز دارند. مکان هایی که به اصلاح به آنها Home و یا سوئیچ گوییم، معمولا برای به دست آوردن موقعیت فعلی از مرجع مورد استفاده قرار می گیرد.
کاربرد های استپ موتور :
کارایی و امکانات یک استپ موتور بسیار بیشتر از انواع دیگر الکترو موتورها می باشد.
بدین لحاظ که بسیاری مکانیزم ها و حالات مختلف چرخش را می توان از آنها گرفت و همچنین این که کنترل این موتور ها بسیار آسان تر از سایرین است به طوری که عمدتا به وسایل کنترل سرعت اضافی از قبیل ترمز های الکتریکی و مکانیکی نیازی ندارند.
هرچند کاربرد استپر موتور ها امروزه بسیار گسترده است اما استپ موتور ها را می توان در وسایلی مانند CNC ها ، پرینتر های ۳ بعدی (3D Printer) ، پرینتر های جوهر افشان ، اسکنر ها ، پلاتر ها ، فلاپی درایو ها ، دی وی دی درایو ها (DVD Drive) ، لنز بعضی از دوربین های دیجیتال یافت که البته این موارد گوشه ای از کاربرد استپ موتور هاست.
به طور کلی برای سیستم هایی که نیاز است موقعیت دقیق ( افقی ، عمودی ) یا زاویه دقیق را تعیین کنیم می توانیم از استپ موتور ها استفاده نماییم. استپ موتور ها در ساخت ماشین های عددی مانند CNC در صنعت استفاده های فراوانی دارند.
همچنین استپ موتور ها در صنایع رباتیک نیز کاربرد وسیعی برای ساخت بازو ها و سایر اجزای دقیق ربات را به خود اختصاص داده اند. استپر موتور در صنایع خودروسازی نیز کاربرد دارد و یکی از موارد کاربرد استپ موتور در خودروها کنترل میزان دور موتور (گاز) ، افزایش دور موتور هنگام استفاده از کولر ، جلوگیری از کاهش ناگهانی دور موتور و در کل ایجاد تعادل و کنترل دور موتور می باشد.
موقعیت یابی (Positioning) :
از آنجایی که استپر موتور در گام هایی دقیق و قابل تکرار حرکت می کند، در کاربرد هایی که نیاز به موقعیت یابی دقیق است مانند پرینتر های سه بعدی ، CNC ، پلتفرم های دوربین و پلاتر های X و Y، بعضی از دیسک های گردان برای موقعیت خواندن یا نوشتن هد ، نسبت به انواع دیگر موتور ها برتری دارند.
کنترل سرعت (Speed Control) :
این نوع موتور با افزایش دقیقی که در حرکت دارد، کنترل عالی در سرعت چرخش سیستم های اتوماسیون و رباتیک می تواند داشته باشد.
انواع استپ موتور :
چهار نوع اصلی از استپ موتورها وجود دارد :
1- استپ موتورهای با مغناطیس دائم (Permanent magnet) : این نوع استپ موتور دارای آهنربای دائمی است و بر طبق پالس های اعمال شده به سمت استاتور دفع یا جذب میشوند.
2- استپ موتورهای با مقاومت مغناطیسی متغیر (Variable reluctance) : این نوع موتور دارای روتور هسته آهنی هستند که به سمت قطب استاتور جدب میشوند و با حداقل تمایل بین استاتور و روتور حرکت میکنند.
3- استپ موتورهای سنکرون هایبرید (Hybrid synchronous) : این نوع موتور ترکیبی از دو نوع قبلی است.
4- استپ موتورهای لاوت LAVET TYPE
نحوه عملکرد انواع استپ موتور :
روتور موتورهای مغناطیس دائم (PM) از مغناطیسهای دائم تشکیل گردیده است و با جاذبه و دافعه بین مغناطیس روتور و مغناطیس استاتور عمل مینماید. موتورهای با مقاومت مغناطیسی متغیر از یک صفحه آهنی به عنوان روتور استفاده گردیده و بر این اساس عمل مینماید که حداقل مقدار مقاومت مغناطیسی، زمانیکه روتور در حال جذب به سمت قطبهای استاتور است، زمانی رخ میدهد که حداقل فاصله وجود دارد.
گروه سوم را به آین دلیل هایبرید مینامند که در ساختار آنها از دو تکنیک مغناطیس دائم و مقاومت مغناطیسی متغیر با هم، جهت رسیدن به حداکثر توان در کوچکترین فضا استفاده شده است.
جدای از اینها ما می توانیم موتورهای استپر را بر اساس نوع سیم پیچ استاتور نیز به عنوان تک قطبی و دو قطبی طبقه بندی کنیم :
استپ موتور دو قطبی : سیم پیچ های استاتور موجود در این نوع موتور سیم مشترک ندارند. درایو کردن این نوع موتور پله ای متفاوت و پیچیده است و بدون درایور میکروکنترلر نمیتوان مدار درایور را به راحتی طراحی کرد.
استپ موتور تک قطبی : در این نوع استپ موتور میتوانیم از مرکز سیم کشی هر دو سیم پیچ فاز برای یک زمین یا قدرت مشترک استفاده کنیم. این امر باعث میشود درایو کردن موتور ها آسان باشد.
روش های راه اندازی استپ موتور یا موتور پله ای :
از آنجا که استاتور استپ موتور از جفت کویل های مختلف تشکیل شده است، هر جفت کویل میتواند در روش های مختلفی بر انگیخته شود. این امر باعث میشود استپر موتور در حالت های مختلفی کار کند، طبقه بندی زیر را مطالعه بفرمایید.
1- راه اندازی استپ موتور روش تمام پله Full Stepping :
برای راه اندازی یک موتور پله ای نیاز به هیچ مداری نیست. برای مثال برای راه اندازی یک موتور تک قطبی کافی است دو سیم مثبت را به سر مثبت منبع ولتاژ وصل کنید و سر منفی منبع ولتاژ را به ترتیب به سیم های a,b,c,d موتور اتصال دهید.می بینید که موتور در جهت خاصی شروع به حرکت می کند . یعنی هر بار که سیم منفی را به پایه ای از موتور وصل کنید ، موتور یک پله به جلو می رود و تا زمانی که ولتاژ منفی را از آن سیم قطع نکرده اید ، موتور روی همان پله قفل می شود برای اینکه موتور به حرکت خود در یک جهت ادامه دهد ، حتما باید سر منفی منبع به ترتیب به سیم های 1a,2a,1b,2b وصل شود.
اگر پالس ها به ترتیب اعمال نشوند ، موتور در هیچ جهت خاصی حرکت نمی کند و مرتبا تغییر جهت می دهد. در این روش در هر پالس موتور یک پله جلو می رود .این روش تمام پله full stepping نام دارد.
دراین حالت تحریک استپ موتور را میتوان یک به طور کامل 360 درجه ای چرخاند. اما در این حالت چرخش صاف نخواهد بود. در این حالت ما میتوانیم دو روش انجام دهیم :
- پله ای کردن تک فاز : در این حالت فقط یک ترمینال (فاز) موتور در هر زمان انرژی می گیرد. در این صورت تعداد پله ها کمتر است و از رو میتواند 360 درجه کامل بچرخد. از آنجا که تعداد پله ها کمتر است ، میزان انرژی مصرف شده توسط این روش کم است.
- پله ای کردن دو فاز : همانطور که از نام این روش مشخص است، دو فاز یکی خواهند بود. این روش دارای همان مراحل پله ای کردن تک فاز است، اما از آنجا که دو سیم پیچ در یک زمان انرژی می گیرند می تواند گشتاور و سرعت بهتری را در مقایسه با روش قبلی فراهم کند. اگرچه این روش انرژی بیشتری را نیز مصرف می کند.
2 – راه اندازی استپ موتور روش نیم پله Half Stepping :
روش دیگری هم به نام نیم پله half stepping وجود دارد که موتور را به ازای هر پالس به اندازه نیم پله جلو می برد.
حالت نیم پله یا Half Step ترکیبی از روش های تک فاز و دو فاز است. این ترکیب به ما کمک میکند تا از معایب ذکر شده در دو حالت قبلی راحت شویم .
3- راه اندازی استپر موتور به روش میکرو استپینگ Micro Stepping :
در این روش می توان فاصله بین دو پله را به چند قسمت تقسیم کرد و موتور را روی هر کدام از این موقعیت ها متوقف نمود و در واقع به زاویه گام کوچکتری رسید.
در این مورد به سخت افزار برای راه اندازی موتور های پله ای نیاز می باشد که وسایلی هستند که قادرند موتور ها را راه اندازی کنند و جریان مورد نیاز آن ها را تامین کنند و برای راه اندازی خودشان نیاز به جریان زیاد نیست.
حالت میکرو پله از همه پیچیده تر است. اما این جالت دقت بسیار خوبی را در کنار گشتاور خوب و عملکرد خوب ارائه میدهد. در این روش سیم پیچ با دو موج سینوسی که از هم 90 درجه فاصله دارند، بر انگیخته میشوند. با این روش میکرو استپ میتواند 256 پله را انجام دهد تا یک چرخش انجام شود. این باعث میشود موتور سریع تر و نرم تر چرخش کند.
همان گونه که دیدیم برای راه اندازی موتور پله ای نیاز به مدار خاصی نمی باشد فقط اینکه برای حل مسائل واقعی نیاز است که پالس ها بطور خودکار در زمان معین و تعداد معین و یا حتی گاهی بار سریع به موتور برسد.
مشخصات فنی استپ موتور یا موتور پله ای :
ولتاژ : موتور های پله ای با ولتاژ کارهای مختلفی ساخته می شوند ، رایج ترین آن ها 5V, 12V , 24V است. همواره اعمال ولتاژ کمی بالاتر از ولتاژ نامی موتور برای افزایش گشتاور در کارکرد بهتر موتور توصیه می شود.
جریان : مقدار جریانی که وقتی موتور در حال کار است در سیم پیچ ها جاری می شود. در ابتدای هر پله جریان بیشتر ی از سیم پیچ ها می گذرد.
گشتاور : گشتاور موتور یکی از مهمترین عوامل در انتخاب یک موتور است. گشتاور موتور معرف مقدار ماکزیمم گشتاوری است که می توان به موتور اعمال کرد بدون اینکه حرکت موتور دچار اختلال شود.
زاویه گام : زاویه گام ، زاویه ای است که شفت موتور با اعمال یک پالس طی می کند. زاویه گام معمولا بر حسب درجه بیان می شود . موتورهایی با زاویه گام های 90 – 15 – 7/5 – 3/6 – 1/8 – 0.72 درجه ساخته شده است.
سیگنال پالس چیست؟
سیگنال پالس یک سیگنال الکترونیکی است که سطح ولتاژ آن بطور مکرر روشن و خاموش می شود. هر چرخه روشن وخاموش بعنوان یک پالس حساب می شود. یک فرمان با یک پالس باعث می شود که محور خروجی موتور به یک پله برسد، سطح سیگنال مربوط به شرایط روشن و خاموش شدن ولتاژ به ترتیب H و L می باشد.
پالس چیست ؟
مقدار چرخش موتور استپر متناسب با تعداد سیگنال های پالسی (شماره پالس) است که به درایور داده میشود. رابطه ی چرخ موتور پله ای (زاویه چرخش محور خروجی موتور) و تعداد پاس به شرح زیر بیان می شود: سرعت موتور استپر با سرعت سیگنال های پالس (فرکانس پالس) که به درایور استپر داده شده است، متناسب هست.
2 دیدگاه
استپ موتور چیست ؟ و چگونه کار می کند ؟ , استپ موتور , استپر موتور , Stepper Motor , موتور پله ای , اجزا تشکیل دهنده استپ موتور , انواع استپ موتور , راه اندازی استپ موتور , مزایا و معایب استپ موتور
خیلی عالی لذت بردم دست شما درد نکنه ولی اگه همراه با توضیحات در هر مقطع تصویر بود محشر میشد ولی روی هم رفته مطالب بسیار مفیدی بودند